Das Einfädeln zwischen Autos in einem Spiel auf dem Smartphone, eine Quadcopter-Drohne, die trotz wechselnder Winde in der Luft bleibt, das Staubsaugen des Hauses mit einem Roboter und die Übersetzung Ihrer präzisen Bewegungen beim Tragen eines VR-Headsets haben alle eines gemeinsam. Sie alle verwenden Sensoren, insbesondere eine IMU (Inertial Measurement Unit), um richtig zu funktionieren.
Donnerstag, 15. November 2018
Das Einfädeln zwischen Autos in einem Spiel auf dem Smartphone, das Halten einer Quadcopter-Drohne trotz wechselnden Windes, das Staubsaugen Ihres Hauses mit einem Roboter und die Übersetzung Ihrer präzisen Bewegungen beim Tragen eines VR-Headsets haben alle eines gemeinsam. Sie alle verwenden Sensoren, insbesondere eine IMU (Inertial Measurement Unit), um richtig zu funktionieren.
Bevor wir uns IMUs im Speziellen ansehen, lassen Sie uns allgemeiner beginnen. Ein Sensor ist ein elektronisches Gerät, das zusammen mit anderen elektronischen Geräten verwendet wird, um Veränderungen in einer Umgebung zu erkennen, wie z. B. Licht, Schall oder Bewegung. Der Sensor gibt diese Informationen dann an die elektronischen Geräte zurück, mit denen er verbunden ist.
Was kann ein Sensor messen?
- Taktile Eingänge: Tasten oder Touchscreens
- Bewegungseingänge: Ihr Telefon erkennt, dass Sie es auf Breitbild umgestellt haben
- Lichteingänge: Ihre Scheinwerfer schalten sich nachts ein
- Temperatureingänge: ein Thermostat passt sich automatisch nach oben oder unten an
- Feuchtigkeits-/Feuchtigkeits-Eingänge: Ihre Scheibenwischer schalten sich bei Regen ein
- Magnetische Feldeingänge: Ihr GPS weiß, in welche Richtung Sie fahren
- Vibrationseingänge: eine Ölbohrung auf einem Feld wird auf Sicherheit überwacht
- Chemische Eingänge: ein Kohlenmonoxid-Detektor meldet gefährliche Werte
- Biologische Eingänge: erkennen Tumore, erhöhte Blutwerte oder Giftstoffe
Eine IMU ist ein spezieller Sensortyp, der Winkelgeschwindigkeit, Kraft und manchmal auch das Magnetfeld misst. IMUs bestehen aus einem 3-Achsen-Beschleunigungsmesser und einem 3-Achsen-Gyroskop, was einer 6-Achsen-IMU entsprechen würde. Sie können auch ein zusätzliches 3-Achsen-Magnetometer enthalten, was dann als 9-Achsen-IMU gelten würde. Technisch gesehen bezieht sich der Begriff „IMU“ nur auf den Sensor, aber IMUs werden oft mit Sensorfusionssoftware gepaart, die Daten von mehreren Sensoren kombiniert, um Messungen der Orientierung und des Kurses zu liefern. Im allgemeinen Sprachgebrauch kann sich der Begriff „IMU“ auf die Kombination aus Sensor und Sensorfusionssoftware beziehen; diese Kombination wird auch als AHRS (Attitude Heading Reference System) bezeichnet.
Wo findet man IMUs?
Gängige Anwendungen für IMUs sind die Richtungsbestimmung in einem GPS-System, die Verfolgung von Bewegungen in Unterhaltungselektronik wie Mobiltelefonen und Videospiel-Fernbedienungen oder die Verfolgung der Kopfbewegungen eines Benutzers in AR- (Augmented Reality) und VR-Systemen (Virtual Reality). Diese Bewegungs- und Orientierungsinformationen gelten auch für die Aufrechterhaltung des Gleichgewichts einer Drohne, die Verbesserung des Kurses Ihres Staubsaugerroboters und anderer IoT- und Connected-Home-Geräte.
Im industriellen Einsatz können Sie IMUs zur Ausrichtung und Messung der Position von Geräten wie Antennen verwenden. IMUs werden auch verwendet, um Flugzeuge zu manövrieren, mit oder ohne einen bemannten Piloten. Im Consumer-Bereich verwenden einige In-Flight-Entertainment-Systeme IMUs in ihren Fernbedienungen, um neben der Berührung auch die Zugänglichkeit zu verbessern. Ein ähnlicher Ansatz ist bei LG Smart TV-Fernbedienungen zu sehen, die es dem Benutzer ermöglichen, die Benutzeroberfläche des Fernsehers mit einem intuitiven Point-and-Click-Ansatz anstelle von Richtungstasten zu steuern.
Zukünftige Anwendungen werden wahrscheinlich eine engere Integration und Verschmelzung der IMU mit Technologien wie GPS (Global Positioning System), RF (Radio Frequency) und LiDAR (Light Detection And Ranging) sehen, was eine genaue Lokalisierung von Personen, Fahrzeugen und Geräten (auch autonomen), sowohl im Innen- als auch im Außenbereich, ermöglicht.
Wie funktioniert eine IMU?
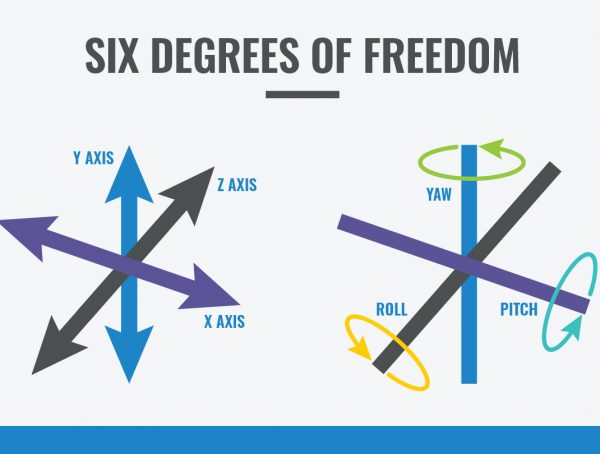
Eine IMU bietet 2 bis 6 DOF (Degrees of Freedom), was sich auf die Anzahl der verschiedenen Möglichkeiten bezieht, mit denen sich ein Objekt im 3D-Raum bewegen kann. Das Maximum sind 6 DOF, was 3 Grad Translationsbewegung (flach) über eine gerade Ebene/entlang jeder Achse (vorne/hinten, rechts/links, oben/unten) und 3 Grad Rotationsbewegung über die x-, y- und z-Achse/um jede Achse beinhaltet.
![]()
Die von einer IMU gesammelten Rohdaten geben einen Eindruck von der Welt um sie herum, aber diese Informationen können auch verarbeitet werden, um zusätzliche Erkenntnisse zu gewinnen. Die Sensorfusion ist die (mathematische) Kunst, die Daten der einzelnen Sensoren in einer IMU zu kombinieren, um ein vollständigeres Bild der Orientierung und des Kurses des Geräts zu erhalten. So können Sie z. B. die Informationen des Gyroskops für die Rotationsbewegung mit denen des Beschleunigungssensors für die Schwerkraft kombinieren, um einen Referenzrahmen zu erstellen. Sie können zusätzlich Informationen über das Erdmagnetfeld hinzufügen, um den gesamten Sensor am Erdrahmen auszurichten.
Trends bei IMU-Sensoren
IMUs sind nur ein Teil eines größeren Sensormarktes, der in letzter Zeit eine starke Nachfrage verzeichnet. Ein wichtiger Trend, der dieses Wachstum vorantreibt, ist die steigende Nachfrage nach MEMS-Bauteilen (mikroelektromechanische Systeme), die in der Regel 20 Mikrometer bis 1 mm groß sind. Die immer kleiner werdenden Gerätegrößen setzen die Komponentenhersteller unter Druck, ihre Formfaktoren auf mikroskopisch kleine Größen zwischen 1 und 100 Mikrometern zu verkleinern. Die Sensorindustrie folgt diesem Beispiel und verkleinert ihre Formfaktoren ebenfalls.
Neben der physikalischen Größe beeinflussen auch andere Trends die Zukunft der Sensoren. Die Preissensibilität nimmt zu, da eine wachsende Zahl von Anwendungen die Nachfrage nach kostengünstigeren Massenproduktionen von Sensoren antreibt. Die schiere Menge an Sensoren, die von Smartphones nachgefragt wird, treibt die Kosten für MEMS-Trägheitssensoren in die Höhe, so dass sie in immer mehr Produkten eingesetzt werden, aber die Unternehmen stoßen immer noch auf technische Herausforderungen, wenn sie sie tatsächlich einsetzen.
Effizienz wird branchenweit immer wichtiger, so dass der Stromverbrauch auf Komponentenebene ein weiteres wachsendes Problem darstellt. Gleichzeitig verlängert sich die erwartete nutzbare Lebensdauer von Sensoren für bestimmte Anwendungen. So kann ein Chip, der in einer industriellen Automatisierungsanwendung eingesetzt wird, ein Jahrzehnt oder länger laufen, im Vergleich zu einem Chip in einem Consumer-Gerät, bei dem nur ein paar Jahre erwartete Lebensdauer akzeptabel sind. Die Anforderungen an die Sensorqualität und die Testbedingungen unterscheiden sich ebenfalls zwischen Unterhaltungselektronik, Automobil- und Industrieanwendungen.
3 Haupttypen von Bewegungssensoren
- Beschleunigungssensoren: Der am häufigsten verwendete Typ eines Bewegungssensors ist der Beschleunigungssensor. Er misst die Beschleunigung (Änderung der Geschwindigkeit) über eine einzelne Achse, z. B. wenn Sie in Ihrem Auto Gas geben oder Ihr Telefon fallen lassen. Beschleunigungssensoren messen die lineare Beschleunigung in eine bestimmte Richtung. Ein Beschleunigungsmesser kann auch verwendet werden, um die Schwerkraft als nach unten gerichtete Kraft zu messen. Wenn Sie die Beschleunigung einmal integrieren, erhalten Sie einen Schätzwert für die Geschwindigkeit, und wenn Sie erneut integrieren, erhalten Sie einen Schätzwert für die Position. Aufgrund der doppelten Integration und des heutigen Stands der Technik ist ein Beschleunigungsmesser keine empfohlene Methode zur Abstandsschätzung.
- Gyroskop: Während Beschleunigungsmesser lineare Beschleunigungen messen können, können sie keine Verdrehungen oder Rotationsbewegungen messen. Gyroskope hingegen messen die Winkelgeschwindigkeit um drei Achsen: Pitch (x-Achse), Roll (y-Achse) und Yaw (z-Achse). Bei Integration mit einer Sensorfusionssoftware kann ein Gyroskop zur Bestimmung der Ausrichtung eines Objekts im 3D-Raum verwendet werden. Während ein Gyroskop keinen ursprünglichen Bezugsrahmen hat (wie die Schwerkraft), können Sie seine Daten mit den Daten eines Beschleunigungssensors kombinieren, um die Winkelposition zu messen. Einen ausführlichen Blick auf die verschiedenen Arten von Gyroskopen finden Sie in unserem zweiten Blog mit dem Titel „Erkundung der Anwendung von Gyroskopen“.
- Magnetometer: Ein Magnetometer misst, wie der Name schon sagt, Magnetfelder. Es kann Schwankungen im Magnetfeld der Erde erkennen, indem es die magnetische Flussdichte der Luft am Punkt des Sensors im Raum misst. Durch diese Schwankungen findet es den Vektor in Richtung des magnetischen Nordens der Erde. Dies kann in Verbindung mit Beschleunigungsmesser- und Gyroskopdaten zur Bestimmung des absoluten Kurses verwendet werden. Wie Sie gesehen haben, werden IMUs zur Messung von Beschleunigung, Winkelgeschwindigkeit und Magnetfeldern verwendet, und in Kombination mit Sensorfusionssoftware können sie zur Bestimmung von Bewegung, Orientierung und Kurs verwendet werden. Sie sind in vielen Anwendungen in der Unterhaltungselektronik und im industriellen Sektor zu finden. In unserem nächsten Blog-Beitrag werden wir uns näher mit Gyroskopen und deren Einsatzmöglichkeiten beschäftigen.
Wie Sie gesehen haben, werden IMUs zur Messung von Beschleunigung, Winkelgeschwindigkeit und Magnetfeldern verwendet und können in Kombination mit Sensorfusionssoftware zur Bestimmung von Bewegung, Orientierung und Kurs verwendet werden. Sie sind in vielen Anwendungen in der Unterhaltungselektronik und im industriellen Sektor zu finden. In unserem nächsten Blog-Beitrag tauchen wir tiefer in die Welt der Gyroskope ein und erklären, wofür sie eingesetzt werden.

Charles Pao
Charles Pao begann bei Hillcrest Labs nach seinem Abschluss an der Johns Hopkins University mit einem Master of Science in Elektrotechnik. Er begann in der Software-Entwicklung zu arbeiten und erstellte ein Black-Box-System zur Auswertung von Bewegungsmerkmalen. Mit einer Leidenschaft für Medien und Kommunikation, begann Charles, Demo- und Produktvideos für Hillcrest Labs zu produzieren. Diese Leidenschaft führte zu einem offiziellen Positionswechsel ins Marketing. Gegenwärtig ist er Hillcrests erster Ansprechpartner für Informationen und Support und leitet deren Marketingbemühungen. Er hat auch verschiedene Account- und Projekt-Management-Positionen inne. Charles erwarb außerdem einen Bachelor of Science in Elektrotechnik und Computertechnik an der Johns Hopkins University.
Sie könnten auch mögen
Mehr von Sensor fusion
Genaue Bewegungsverfolgung in tragbaren Geräten
Unser Leben hat sich durch tragbare, vernetzte Gadgets – am offensichtlichsten das Smartphone, aber auch eine Vielzahl von anderen, …

Wie Sensortechnologie Kontextbewusstsein in Hearables ermöglicht
Einer der am schnellsten wachsenden Bereiche der Unterhaltungselektronik ist der Markt der Hearables. Diese On-Ear-Geräte, die von kabellosen Ohrhörern bis hin zu …

SLAM und Multi-Sensing-Roboter: Bald in jedem Haus
Robotik ist für viele von uns immer noch eine Anwendung, die meist auf die Fabrik- oder Lagerhalle beschränkt ist. Wir sehen Medien …