Se faufiler entre les voitures dans un jeu sur votre téléphone, maintenir un drone quadcopter à flot malgré les vents changeants, passer l’aspirateur chez vous avec un robot et traduire vos mouvements précis lorsque vous portez un casque VR ont tous un point commun. Ils utilisent chacun des capteurs, plus précisément une IMU (unité de mesure inertielle), afin de fonctionner correctement.
Jeudi 15 novembre 2018
Se faufiler entre les voitures dans un jeu sur votre téléphone, maintenir un drone quadcopter à flot malgré les vents changeants, aspirer votre maison avec un robot et traduire vos mouvements précis lorsque vous portez un casque VR ont tous un point commun. Ils utilisent tous des capteurs, plus précisément une IMU (unité de mesure inertielle), pour fonctionner correctement.
Avant de nous pencher sur les IMU en particulier, commençons de manière plus générale. Un capteur est un dispositif électronique utilisé de concert avec d’autres appareils électroniques conçus pour détecter les changements dans un environnement, tels que la lumière, le son ou le mouvement. Le capteur transmet ensuite ces informations aux appareils électroniques auxquels il est connecté.
Que peut mesurer un capteur ?
- Entrées tactiles : boutons ou écrans tactiles
- Entrées de mouvement : votre téléphone reconnaît que vous l’avez mis en écran large
- Entrées de lumière : vos phares s’allument la nuit
- Entrées de température : un thermostat s’ajuste automatiquement à la hausse ou à la baisse
- Entrées d’humidité : vos essuie-glaces s’allument sous la pluie
- Entrées de champ magnétique : votre GPS sait dans quelle direction vous vous dirigez
- Entrées de vibrations : un forage pétrolier dans un champ est surveillé pour la sécurité
- Entrées chimiques : un détecteur de monoxyde de carbone signale des niveaux dangereux
- Entrées biologiques : détecter des tumeurs, des niveaux sanguins élevés ou des toxines
Un IMU est un type spécifique de capteur qui mesure la vitesse angulaire, la force et parfois le champ magnétique. Les IMU sont composés d’un accéléromètre à 3 axes et d’un gyroscope à 3 axes, ce qui serait considéré comme un IMU à 6 axes. Elles peuvent également inclure un magnétomètre supplémentaire à 3 axes, ce qui correspond à un IMU à 9 axes. Techniquement, le terme « IMU » désigne uniquement le capteur, mais les IMU sont souvent associés à un logiciel de fusion de capteurs qui combine les données de plusieurs capteurs pour fournir des mesures d’orientation et de cap. Dans l’usage courant, le terme « IMU » peut être utilisé pour désigner la combinaison du capteur et du logiciel de fusion de capteurs ; cette combinaison est également appelée AHRS (Attitude Heading Reference System).
Où trouve-t-on les IMU ?
Les applications courantes des IMU comprennent la détermination de la direction dans un système GPS, le suivi du mouvement dans les appareils électroniques grand public tels que les téléphones portables et les télécommandes de jeux vidéo, ou le suivi des mouvements de la tête d’un utilisateur dans les systèmes de RA (réalité augmentée) et de RV (réalité virtuelle). Ces informations de mouvement et d’orientation s’appliquent également au maintien de l’équilibre d’un drone, à l’amélioration du cap de votre aspirateur robot et à d’autres appareils IoT et de maison connectée.
Dans le domaine industriel, vous pouvez utiliser des IMU pour aligner et mesurer le positionnement d’équipements tels que des antennes. Les IMU sont également utilisés pour aider à manœuvrer les avions, avec ou sans pilote habité. Dans le domaine de la consommation, certains systèmes de divertissement en vol utilisent des IMU dans leurs télécommandes pour ajouter l’accessibilité en plus du toucher. Une approche similaire peut être observée avec les télécommandes LG Smart TV qui permettent aux utilisateurs de contrôler l’interface utilisateur du téléviseur avec une approche intuitive de type pointer-cliquer au lieu des boutons directionnels.
Les applications futures verront probablement une intégration et une fusion plus étroites de l’IMU avec des technologies comme le GPS (Global Positioning System), la RF (Radio Frequency) et le LiDAR (Light Detection And Ranging), ce qui permettra une localisation précise des personnes, des véhicules et des équipements (y compris autonomes), à l’intérieur comme à l’extérieur.
Comment fonctionne un IMU ?
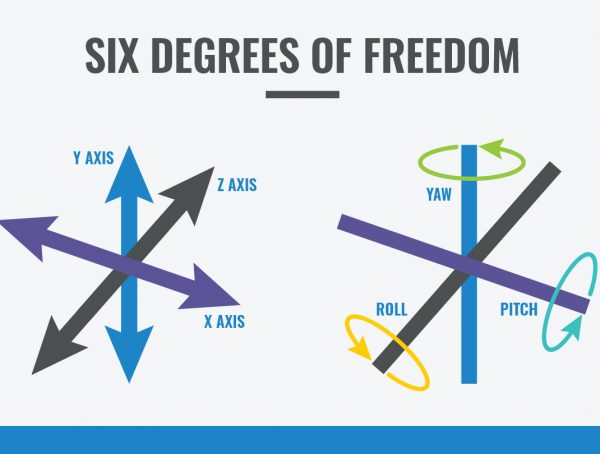
Un IMU fournit 2 à 6 DOF (degrés de liberté), ce qui fait référence au nombre de façons différentes dont un objet est capable de se déplacer dans l’espace 3D. Le maximum possible est de 6 DOF, ce qui comprendrait 3 degrés de mouvement de translation (à plat) sur un plan droit/le long de chaque axe (avant/arrière, droite/gauche, haut/bas) et 3 degrés de mouvement de rotation sur les axes x, y et z/autour de chaque axe.
![]()
Les données brutes collectées par un IMU donnent une idée du monde qui l’entoure, mais ces informations peuvent également être traitées pour obtenir des informations supplémentaires. La fusion de capteurs est l’art (mathématique) de combiner les données de chaque capteur d’un IMU pour créer une image plus complète de l’orientation et du cap de l’appareil. Par exemple, tout en examinant les informations du gyroscope pour le mouvement de rotation, vous pouvez incorporer la sensation de gravité de l’accéléromètre pour créer un cadre de référence. Vous pouvez en outre ajouter des informations sur le champ magnétique de la Terre pour aligner l’ensemble du capteur sur le cadre de la Terre.
Tendances en matière de capteurs IMU
Les IMU ne sont qu’une partie d’un marché plus large de capteurs qui a connu une forte demande ces derniers temps. Une tendance importante à l’origine de cette croissance est la demande croissante de dispositifs MEMS (système microélectromécanique), dont la taille est généralement comprise entre 20 micromètres et 1 mm. La diminution constante de la taille des dispositifs met la pression sur les fabricants de composants pour qu’ils réduisent leurs facteurs de forme à des proportions microscopiques, entre 1 et 100 micromètres. L’industrie des capteurs suit le mouvement, en réduisant également leurs facteurs de forme.
Au delà de la taille physique, plusieurs autres tendances ont également un impact sur l’avenir des capteurs. La sensibilité au prix augmente, car un ensemble d’applications en expansion entraîne une demande de production de masse de capteurs à moindre coût. Pendant ce temps, le simple volume de capteurs demandés par les smartphones fait baisser le coût des capteurs inertiels MEMS, de sorte qu’ils sont mis en œuvre dans de plus en plus de produits, mais les entreprises se heurtent encore à des défis techniques lors de leur utilisation effective.
L’efficacité devient plus critique à l’échelle de l’industrie, de sorte que la consommation d’énergie au niveau des composants est une autre préoccupation croissante. Dans le même temps, la durée de vie utile prévue s’étend également sur les capteurs pour certaines applications. Par exemple, une puce utilisée dans une application d’automatisation industrielle peut avoir besoin de fonctionner pendant une décennie ou plus, alors qu’une puce utilisée dans un appareil grand public n’a qu’une durée de vie de quelques années. Les exigences en matière de qualité des capteurs et de conditions de test seront également différentes selon qu’il s’agit d’applications électroniques grand public, automobiles ou industrielles.
3 Principaux types de dispositifs de détection de mouvement
- Accéléromètre : Le type de capteur de mouvement le plus couramment utilisé est l’accéléromètre. Il mesure l’accélération (changement de vitesse) sur un seul axe, comme lorsque vous appuyez sur l’accélérateur de votre voiture ou que vous laissez tomber votre téléphone. Les accéléromètres mesurent l’accélération linéaire dans une direction particulière. Un accéléromètre peut également être utilisé pour mesurer la gravité en tant que force descendante. En intégrant l’accélération une fois, on obtient une estimation de la vitesse, et en intégrant à nouveau, on obtient une estimation de la position. En raison de la double intégration et de l’état de la technologie actuelle, un accéléromètre n’est pas une méthode recommandée pour l’estimation de la distance.
- Gyroscope : Alors que les accéléromètres peuvent mesurer l’accélération linéaire, ils ne peuvent pas mesurer les mouvements de torsion ou de rotation. Les gyroscopes, en revanche, mesurent la vitesse angulaire autour de trois axes : le tangage (axe x), le roulis (axe y) et le lacet (axe z). Lorsqu’il est intégré à un logiciel de fusion de capteurs, un gyroscope peut être utilisé pour déterminer l’orientation d’un objet dans un espace 3D. Bien qu’un gyroscope n’ait pas de cadre de référence initial (comme la gravité), vous pouvez combiner ses données avec celles d’un accéléromètre pour mesurer la position angulaire. Pour un examen approfondi des différents types de gyroscopes, regardez notre 2e blog intitulé, Explorer l’application des gyroscopes.
- Magnétomètre : Un magnétomètre, comme son nom l’indique, mesure les champs magnétiques. Il peut détecter les fluctuations du champ magnétique terrestre, en mesurant l’intensité du flux magnétique de l’air au point du capteur dans l’espace. Grâce à ces fluctuations, il trouve le vecteur vers le nord magnétique de la Terre. Ce vecteur peut être fusionné avec les données de l’accéléromètre et du gyroscope pour déterminer le cap absolu. Comme vous l’avez vu, les IMU sont utilisées pour mesurer l’accélération, la vitesse angulaire et les champs magnétiques et, lorsqu’elles sont associées à un logiciel de fusion de capteurs, elles peuvent être utilisées pour déterminer le mouvement, l’orientation et le cap. On les trouve dans de nombreuses applications dans l’électronique grand public et le secteur industriel. Dans notre prochain article de blog, nous plongerons plus profondément dans les gyroscopes et ce à quoi ils servent.
Comme vous l’avez vu, les IMU sont utilisés pour mesurer l’accélération, la vitesse angulaire et les champs magnétiques, et, lorsqu’ils sont combinés avec un logiciel de fusion de capteurs, ils peuvent être utilisés pour déterminer le mouvement, l’orientation et le cap. On les trouve dans de nombreuses applications de l’électronique grand public et du secteur industriel. Dans notre prochain billet de blog, nous plongerons plus profondément dans les gyroscopes et leur utilisation.

Charles Pao
Charles Pao a commencé aux Hillcrest Labs après avoir obtenu un Master of Science en génie électrique à l’Université Johns Hopkins. Il a commencé à travailler dans le développement de logiciels, en créant un système de boîte noire pour évaluer les caractéristiques du mouvement. Passionné par les médias et la communication, Charles a commencé à produire des vidéos de démonstration et de produits pour Hillcrest Labs. Cette passion l’a conduit à un transfert de poste officiel vers le marketing. Actuellement, il est le premier point de contact d’Hillcrest pour les informations et l’assistance et gère leurs efforts de marketing. Il a également occupé divers postes de gestion de comptes et de projets. Charles a également obtenu un baccalauréat ès sciences en génie électrique et en génie informatique de l’Université Johns Hopkins.
Vous aimerez peut-être aussi
Davantage de Sensor fusion
Réaliser un suivi de mouvement précis dans les portables grand public
Nos vies ont été transformées par les portables, des gadgets connectés – le plus évident étant le smartphone, mais aussi une multitude d’autres, …

Comment la technologie des capteurs permet la prise en compte du contexte dans les audibles
L’une des verticales à la croissance la plus rapide dans l’électronique grand public est le marché des audibles. Ces dispositifs supra-auriculaires, allant des oreillettes sans fil aux …

SLAM et robots multi-détecteurs : Bientôt dans chaque maison
La robotique, pour beaucoup d’entre nous, est encore une application principalement limitée à l’usine ou à l’entrepôt. Nous voyons dans les médias …
.