Weaving in between cars in a game on your phone, keeping a quadcopter drone afloat despite changing winds, vacuuming your house with a robot, and translating your precise movements when wearing a VR headset all have one thing in common. Cada um deles usa sensores, especificamente uma IMU (Unidade de Medição Inercial), de modo a funcionar correctamente.
Quinta-feira, 15 de Novembro de 2018
Tem uma coisa em comum: colocar entre carros num jogo ao telefone, manter um zangão quadcopter a flutuar apesar de mudar de vento, aspirar a sua casa com um robô, e traduzir os seus movimentos precisos ao usar um auricular VR. Cada um deles usa sensores, especificamente uma IMU (Unidade de Medição Inercial), para funcionar correctamente.
P>Antes de analisarmos as IMUs em particular, vamos começar mais amplamente. Um sensor é um dispositivo electrónico utilizado em concertação com outra electrónica concebida para detectar alterações num ambiente, tais como luz, som ou movimento. O sensor passa então essa informação para os dispositivos electrónicos a que está ligado.
O que pode um sensor medir?
- Ingressos táteis: botões ou ecrãs tácteis
- Ingressos de movimento: o seu telefone reconhece que o transformou em ecrã panorâmico
- Ingressos luminosos: os seus faróis acendem-se à noite
- Informações vibratórias: uma broca de petróleo num campo é monitorizada para segurança
- Informações químicas: um detector de monóxido de carbono assinala níveis perigosos
- Informações biológicas: detectar tumores, níveis elevados de sangue ou toxinas
Ingressos de temperatura: um termóstato ajusta-se automaticamente para cima ou para baixoIngressos de humidade/umidade: os seus limpa pára-brisas acendem-se à chuvaIngressos de campo magnético: o seu GPS sabe em que direcção se dirige
Um IMU é um tipo específico de sensor que mede a taxa angular, força e por vezes o campo magnético. As UIM são compostas por um acelerómetro de 3 eixos e um giroscópio de 3 eixos, que seria considerado uma UIM de 6 eixos. Podem também incluir um magnetómetro adicional de 3 eixos, que seria considerado uma IMU de 9 eixos. Tecnicamente, o termo “IMU” refere-se apenas ao sensor, mas as IMUs são frequentemente emparelhadas com software de fusão de sensores que combina dados de vários sensores para fornecer medidas de orientação e de rumo. No uso comum, o termo “IMU” pode ser usado para se referir à combinação do sensor e do software de fusão de sensores; esta combinação é também referida como um AHRS (Attitude Heading Reference System).
Onde se encontram IMUs?
Aplicações comuns para IMUs incluem a determinação da direcção num sistema GPS, o seguimento de movimentos em electrónica de consumo, tais como telemóveis e comandos de jogos de vídeo, ou o seguimento dos movimentos da cabeça de um utilizador em sistemas AR (realidade aumentada) e VR (realidade virtual). Esta informação de movimento e orientação também se aplica à manutenção do equilíbrio de um drone, melhorando o cabeçalho do seu aspirador robotizado, e outros dispositivos IoT e dispositivos domésticos conectados.
Em uso industrial, pode utilizar as IMUs para alinhar e medir o posicionamento de equipamentos como antenas. As IMUs são também utilizadas para ajudar a manobrar aeronaves, com ou sem piloto tripulado. No espaço aéreo do consumidor, alguns sistemas de entretenimento em voo utilizam as IMUs nos seus comandos para acrescentar acessibilidade, para além do toque. Uma abordagem semelhante pode ser vista com os comandos LG Smart TV que permitem aos utilizadores controlar a interface do utilizador da TV com uma abordagem intuitiva de apontar e clicar em vez de botões direccionais.
Futuras aplicações verão provavelmente uma integração mais estreita e uma fusão da IMU com tecnologias como GPS (Global Positioning System), RF (Radio Frequency), e LiDAR (Light Detection And Ranging), o que permitirá a localização precisa de pessoas, veículos e equipamentos (incluindo os autónomos), tanto no interior como no exterior.
Como funciona uma IMU?
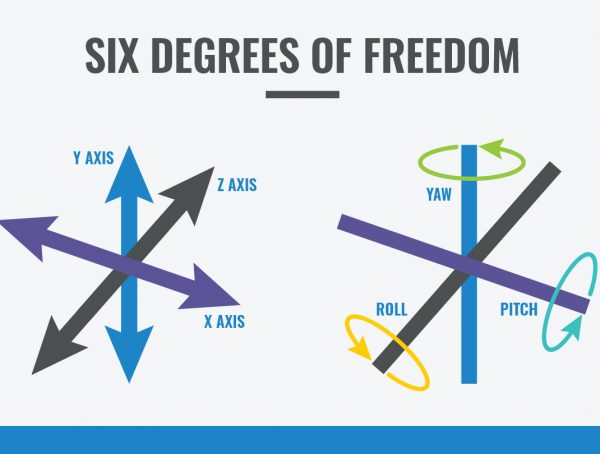
Uma IMU fornece 2 a 6 DOF (Degrees of Freedom), que se refere ao número de diferentes maneiras que um objecto é capaz de se mover através do espaço 3D. O máximo possível é de 6 DOF, que incluiria 3 graus de movimento de translação (plano) através de um plano recto/alongamento de cada eixo (frente/trás, direita/esquerda, cima/baixo) e 3 graus de movimento de rotação através dos eixos x, y e z/sobre cada eixo.
![]()
Os dados brutos recolhidos de uma IMU dão alguma ideia do mundo à sua volta, mas essa informação também pode ser processada para uma visão adicional. A fusão de sensores é a arte (matemática) de combinar os dados de cada sensor numa IMU para criar uma imagem mais completa da orientação e do rumo do dispositivo. Por exemplo, enquanto se observa a informação do giroscópio para o movimento rotacional, é possível incorporar um sentido de gravidade dos acelerómetros para criar um quadro de referência. Pode adicionalmente adicionar informação sobre o campo magnético da Terra para alinhar todo o sensor à moldura da Terra.
Tendências em sensores IMU
IMUs são apenas uma parte de um mercado de sensores maior que tem visto uma forte procura ultimamente. Uma tendência significativa que impulsiona este crescimento é o aumento da procura de dispositivos MEMS (sistema microelectromecânico), que são geralmente de 20 micrómetros a 1mm de tamanho. Os tamanhos dos dispositivos, cada vez mais reduzidos, pressionam os fabricantes de componentes a reduzir os seus factores de forma a proporções microscópicas, entre 1 e 100 micrómetros. A indústria de sensores está a seguir o exemplo, reduzindo também os seus factores de forma.
Além do tamanho físico, várias outras tendências estão também a ter impacto no futuro dos sensores. A sensibilidade aos preços está a aumentar, uma vez que um conjunto em expansão de aplicações impulsiona a procura de sensores de baixo custo de produção em massa. Entretanto, o enorme volume de sensores exigidos pelos smartphones está a fazer baixar o custo dos sensores inerciais MEMS, pelo que estão a ser utilizados em cada vez mais produtos, mas as empresas ainda se deparam com desafios técnicos enquanto os utilizam.
A eficiência está a tornar-se mais crítica em toda a indústria, pelo que o consumo de energia a nível de componentes é outra preocupação crescente. Ao mesmo tempo, o tempo de vida útil esperado está também a expandir-se nos sensores para certas aplicações. Por exemplo, um chip utilizado numa aplicação de automação industrial pode precisar de funcionar durante uma década ou mais, em comparação com um num dispositivo de consumo, onde apenas alguns anos de vida útil esperada são aceitáveis. Os requisitos para a qualidade dos sensores e condições de teste também diferem entre a electrónica de consumo, aplicações automóveis e industriais.
3 Principais Tipos de Dispositivos Sensores de Movimento
- Acelerómetro: O tipo de sensor de movimento mais comummente utilizado é o acelerómetro. Ele mede a aceleração (mudança de velocidade) através de um único eixo, como quando se pisa no acelerómetro no carro ou se deixa cair o telefone. Os acelerómetros medem a aceleração linear numa determinada direcção. Um acelerómetro também pode ser utilizado para medir a gravidade como uma força descendente. A integração da aceleração revela uma vez uma estimativa da velocidade, e a integração dá-lhe novamente uma estimativa da posição. Devido à dupla integração e ao estado da tecnologia actual, um acelerómetro não é um método recomendado de estimativa da distância.
- Giroscópio: Enquanto os acelerómetros podem medir a aceleração linear, eles não podem medir torção ou movimento rotacional. Os giroscópios, contudo, medem a velocidade angular em torno de três eixos: inclinação (eixo x), rotação (eixo y) e guinada (eixo z). Quando integrado com software de fusão de sensores, um giroscópio pode ser utilizado para determinar a orientação de um objecto dentro do espaço 3D. Embora um giroscópio não tenha uma estrutura inicial de referência (como a gravidade), é possível combinar os seus dados com os dados de um acelerómetro para medir a posição angular. Para uma análise aprofundada dos diferentes tipos de giroscópios, consulte o nosso 2º blogue intitulado, Explorando a Aplicação dos Giroscópios.
- Magnetómetro: Um magnetómetro, como o nome sugere, mede campos magnéticos. Pode detectar flutuações no campo magnético da Terra, medindo a densidade do fluxo magnético do ar no ponto do sensor no espaço. Através dessas flutuações, encontra o vector em direcção ao Norte magnético da Terra. Isto pode ser fundido em conjunto com dados do acelerómetro e do giroscópio para determinar o rumo absoluto. Como já viu, as IMUs são utilizadas para medir a aceleração, velocidade angular e campos magnéticos, e, quando combinadas com software de fusão de sensores, podem ser utilizadas para determinar o movimento, orientação e rumo. Encontram-se em muitas aplicações em toda a electrónica de consumo e no sector industrial. No nosso próximo post de blogue, vamos mergulhar mais fundo nos giroscópios e para que são usados.
Como já viu, as IMUs são usadas para medir aceleração, velocidade angular e campos magnéticos, e, quando combinadas com software de fusão de sensores, podem ser usadas para determinar o movimento, orientação e rumo. Encontram-se em muitas aplicações em toda a electrónica de consumo e no sector industrial. No nosso próximo post no blogue, vamos mergulhar mais fundo nos giroscópios e para que são utilizados.
>br>

Charles Pao
Charles Pao começou no Hillcrest Labs depois de se formar na Universidade Johns Hopkins com um mestrado em engenharia eléctrica. Começou a trabalhar no desenvolvimento de software, criando um sistema de caixa negra para avaliar as características do movimento. Com uma paixão pelos media e comunicações, Charles começou a produzir demonstrações e vídeos de produtos para os Laboratórios Hillcrest. Esta paixão levou a uma transferência oficial de posição para o Marketing. Actualmente, ele é o primeiro ponto de contacto da Hillcrest para informação e apoio e gere os seus esforços de marketing. Também desempenhou várias funções de gestão de contas e projectos. Charles também obteve o Bacharelato em Engenharia Electrotécnica e Engenharia Informática pela Universidade Johns Hopkins.
Também pode gostar
h5>h5>Mais da fusão de sensores
Aquiar o rastreio preciso de movimentos em portáteis de consumo
As nossas vidas foram transformadas por portáteis, gadgets ligados – mais obviamente o smartphone, mas também uma multidão de outros, …

Como a tecnologia de sensores permite a percepção do contexto em aparelhos auditivos
Uma das verticais de mais rápido crescimento na electrónica de consumo é o mercado de aparelhos auditivos. Estes dispositivos auriculares, desde os auriculares sem fios a …

SLAM e Robots Multi-Sensing: Brevemente em Cada Casa
Robótica, para muitos de nós, é ainda uma aplicação limitada na sua maioria ao chão de fábrica ou de armazém. Vemos meios …