Tranquillare tra le auto in un gioco sul tuo telefono, tenere a galla un drone quadcopter nonostante i venti variabili, passare l’aspirapolvere in casa con un robot e tradurre i tuoi movimenti precisi quando indossi un auricolare VR hanno tutti una cosa in comune. Ognuno di loro utilizza dei sensori, in particolare un IMU (Inertial Measurement Unit), per funzionare correttamente.
Giovedì 15 novembre 2018
Tornare tra le auto in un gioco sul tuo telefono, tenere a galla un drone quadcopter nonostante i venti variabili, passare l’aspirapolvere in casa tua con un robot e tradurre i tuoi movimenti precisi quando indossi un headset VR hanno tutti una cosa in comune. Ognuno di loro usa dei sensori, in particolare un IMU (Inertial Measurement Unit), per funzionare correttamente.
Prima di esaminare gli IMU in particolare, iniziamo in modo più generale. Un sensore è un dispositivo elettronico usato in concerto con altri dispositivi elettronici progettato per rilevare i cambiamenti in un ambiente, come la luce, il suono o il movimento. Il sensore passa poi queste informazioni ai dispositivi elettronici a cui è collegato.
Cosa può misurare un sensore?
- Ingressi tattili: pulsanti o touchscreen
- Ingressi di movimento: il tuo telefono riconosce che lo hai impostato su widescreen
- Ingressi di luce: i tuoi fari si accendono di notte
- Ingressi di temperatura: un termostato si regola automaticamente su o giù
- Ingressi di umidità/umidità: i tergicristalli si accendono quando piove
- Ingressi di campo magnetico: il tuo GPS sa in che direzione sei diretto
- Input di vibrazione: una trivella in un campo è monitorata per la sicurezza
- Input chimici: un rilevatore di monossido di carbonio segnala livelli pericolosi
- Input biologici: rileva tumori, livelli elevati di sangue o tossine
Un IMU è un tipo specifico di sensore che misura la velocità angolare, la forza e talvolta il campo magnetico. Le IMU sono composte da un accelerometro a 3 assi e un giroscopio a 3 assi, che sarebbe considerato un IMU a 6 assi. Possono anche includere un magnetometro aggiuntivo a 3 assi, che sarebbe considerato un IMU a 9 assi. Tecnicamente, il termine “IMU” si riferisce solo al sensore, ma le IMU sono spesso abbinate a un software di fusione dei sensori che combina i dati di più sensori per fornire misure di orientamento e di direzione. Nell’uso comune, il termine “IMU” può essere usato per riferirsi alla combinazione del sensore e del software di fusione dei sensori; questa combinazione viene anche chiamata AHRS (Attitude Heading Reference System).
Dove si trovano le IMU?
Applicazioni comuni per le IMU includono la determinazione della direzione in un sistema GPS, il monitoraggio del movimento nell’elettronica di consumo come i telefoni cellulari e i telecomandi dei videogiochi, o seguire i movimenti della testa di un utente nei sistemi AR (realtà aumentata) e VR (realtà virtuale). Queste informazioni di movimento e orientamento si applicano anche al mantenimento dell’equilibrio di un drone, al miglioramento della direzione del vostro aspirapolvere robot, e ad altri dispositivi IoT e per la casa collegata.
Nell’uso industriale, si possono usare le IMU per allineare e misurare il posizionamento di attrezzature come le antenne. Le IMU sono anche utilizzate per aiutare a manovrare gli aerei, con o senza un pilota. Nello spazio aereo dei consumatori, alcuni sistemi di intrattenimento in volo usano le IMU nei loro telecomandi per aggiungere l’accessibilità oltre al tocco. Un approccio simile può essere visto con i telecomandi LG Smart TV che permettono agli utenti di controllare l’interfaccia utente del televisore con un approccio intuitivo point-and-click al posto dei pulsanti direzionali.
Le applicazioni future vedranno probabilmente una più stretta integrazione e fusione dell’IMU con tecnologie come il GPS (Global Positioning System), RF (Radio Frequenza), e LiDAR (Light Detection And Ranging), che consentiranno una localizzazione accurata di persone, veicoli e attrezzature (compresi quelli autonomi), sia all’interno che all’esterno.
Come funziona un IMU?
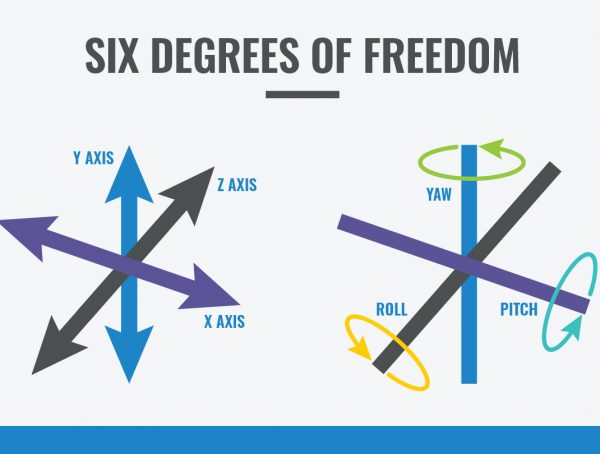
Un IMU fornisce da 2 a 6 DOF (gradi di libertà), che si riferisce al numero di modi diversi in cui un oggetto è in grado di muoversi nello spazio 3D. Il massimo possibile è 6 DOF, che include 3 gradi di traslazione (in piano) su un piano dritto/su ogni asse (davanti/dietro, destra/sinistra, su/giù) e 3 gradi di movimento rotatorio sugli assi x, y e z/su ogni asse.
![]()
I dati grezzi raccolti da una IMU danno un’idea del mondo circostante, ma queste informazioni possono anche essere elaborate per ottenere ulteriori informazioni. La fusione dei sensori è l’arte (matematica) di combinare i dati di ogni sensore in un IMU per creare un quadro più completo dell’orientamento e della direzione del dispositivo. Per esempio, mentre si guardano le informazioni del giroscopio per il movimento rotazionale, si può incorporare il senso di gravità degli accelerometri per creare un quadro di riferimento. È inoltre possibile aggiungere informazioni sul campo magnetico terrestre per allineare l’intero sensore al telaio terrestre.
Tendenze nei sensori IMU
Le IMU sono solo una parte di un mercato dei sensori più ampio che ha visto una forte domanda ultimamente. Una tendenza significativa che guida questa crescita è la crescente domanda di dispositivi MEMS (sistema microelettromeccanico), che sono generalmente di dimensioni da 20 micrometri a 1 mm. Le dimensioni sempre più ridotte dei dispositivi mettono sotto pressione i produttori di componenti per ridurre i loro fattori di forma a proporzioni microscopiche, tra 1 e 100 micrometri. L’industria dei sensori sta seguendo l’esempio, riducendo anche i loro fattori di forma.
Oltre alle dimensioni fisiche, diverse altre tendenze stanno influenzando il futuro dei sensori. La sensibilità al prezzo sta aumentando, dato che una serie di applicazioni in espansione spinge la domanda per una produzione di massa di sensori a basso costo. Nel frattempo, l’enorme volume di sensori richiesti dagli smartphone sta facendo scendere il costo dei sensori inerziali MEMS, per cui vengono utilizzati in un numero sempre maggiore di prodotti, ma le aziende si scontrano ancora con problemi tecnici quando li utilizzano. Allo stesso tempo, la durata di vita utile prevista si sta espandendo anche sui sensori per certe applicazioni. Per esempio, un chip usato in un’applicazione di automazione industriale può avere bisogno di funzionare per un decennio o più, rispetto a uno in un dispositivo di consumo, dove solo pochi anni di vita prevista sono accettabili. I requisiti per la qualità del sensore e le condizioni di test saranno anche diversi tra l’elettronica di consumo, l’automotive e le applicazioni industriali.
3 Tipi principali di dispositivi per sensori di movimento
- Accelerometro: Il tipo più comunemente usato di sensore di movimento è l’accelerometro. Misura l’accelerazione (cambiamento di velocità) su un singolo asse, come quando si preme l’acceleratore in macchina o si fa cadere il telefono. Gli accelerometri misurano l’accelerazione lineare in una particolare direzione. Un accelerometro può anche essere usato per misurare la gravità come forza verso il basso. Integrando l’accelerazione una volta si ottiene una stima della velocità, e integrando di nuovo si ottiene una stima della posizione. A causa della doppia integrazione e dello stato della tecnologia odierna, un accelerometro non è un metodo raccomandato per la stima della distanza.
- Giroscopio: Mentre gli accelerometri possono misurare l’accelerazione lineare, non possono misurare i movimenti di torsione o rotazione. I giroscopi, invece, misurano la velocità angolare su tre assi: passo (asse x), rollio (asse y) e imbardata (asse z). Se integrato con un software di fusione di sensori, un giroscopio può essere usato per determinare l’orientamento di un oggetto nello spazio 3D. Mentre un giroscopio non ha un quadro di riferimento iniziale (come la gravità), è possibile combinare i suoi dati con quelli di un accelerometro per misurare la posizione angolare. Per uno sguardo approfondito ai diversi tipi di giroscopi, guardate il nostro secondo blog intitolato, Esplorando l’applicazione dei giroscopi.
- Magnetometro: Un magnetometro, come suggerisce il nome, misura i campi magnetici. Può rilevare le fluttuazioni del campo magnetico terrestre, misurando la densità di flusso magnetico dell’aria nel punto del sensore nello spazio. Attraverso queste fluttuazioni, trova il vettore verso il Nord magnetico della Terra. Questo può essere fuso insieme ai dati dell’accelerometro e del giroscopio per determinare la direzione assoluta. Come avete visto, le IMU sono usate per misurare l’accelerazione, la velocità angolare e i campi magnetici, e, se combinate con il software di fusione dei sensori, possono essere usate per determinare il movimento, l’orientamento e la direzione. Si trovano in molte applicazioni nell’elettronica di consumo e nel settore industriale. Nel nostro prossimo post sul blog, ci immergeremo più a fondo nei giroscopi e a cosa servono.
Come avete visto, le IMU sono usate per misurare l’accelerazione, la velocità angolare e i campi magnetici e, se combinate con il software di fusione dei sensori, possono essere usate per determinare il movimento, l’orientamento e la direzione. Si trovano in molte applicazioni nell’elettronica di consumo e nel settore industriale. Nel nostro prossimo post sul blog, ci immergeremo più a fondo nei giroscopi e a cosa servono.

Charles Pao
Charles Pao ha iniziato a Hillcrest Labs dopo essersi laureato alla Johns Hopkins University con un Master of Science in ingegneria elettrica. Ha iniziato a lavorare nello sviluppo di software, creando un sistema a scatola nera per valutare le caratteristiche del movimento. Con una passione per i media e le comunicazioni, Charles ha iniziato a produrre video dimostrativi e di prodotto per Hillcrest Labs. Questa passione ha portato a un trasferimento ufficiale di posizione nel marketing. Attualmente, è il primo punto di contatto di Hillcrest per informazioni e supporto e gestisce i loro sforzi di marketing. Ha anche ricoperto vari ruoli di gestione di account e progetti. Charles ha anche conseguito una laurea in ingegneria elettrica e informatica alla Johns Hopkins University.
Ti potrebbe interessare anche
Altro da Sensor fusion
Realizzare un accurato motion tracking nei portatili di consumo
Le nostre vite sono state trasformate da gadget portatili, gadget connessi – il più ovvio è lo smartphone, ma anche una moltitudine di altri, …

Come la tecnologia dei sensori permette la consapevolezza del contesto negli apparecchi acustici
Uno dei verticali in più rapida crescita nell’elettronica di consumo è il mercato degli apparecchi acustici. Questi dispositivi on-ear, che vanno dagli auricolari wireless a …

SLAM e robot multisensoriali: Presto in ogni casa
La robotica, per molti di noi, è ancora un’applicazione per lo più limitata alla fabbrica o al magazzino. Vediamo i media …