Transportarse entre los coches de un juego en tu teléfono, mantener a flote un dron cuadricóptero a pesar de los vientos cambiantes, aspirar tu casa con un robot y traducir tus movimientos precisos cuando llevas un casco de RV tienen algo en común. Cada uno de ellos utiliza sensores, concretamente una IMU (Unidad de Medición Inercial), para poder funcionar correctamente.
Jueves, 15 de noviembre de 2018
Conducirse entre coches en un juego en tu teléfono, mantener un dron cuadricóptero a flote a pesar de los vientos cambiantes, aspirar tu casa con un robot y traducir tus movimientos precisos cuando llevas puestos unos auriculares de RV tienen una cosa en común. Cada uno de ellos utiliza sensores, concretamente una IMU (Unidad de Medición Inercial), para poder funcionar correctamente.
Antes de analizar las IMU en particular, empecemos de forma más general. Un sensor es un dispositivo electrónico que se utiliza junto con otros componentes electrónicos diseñados para detectar cambios en un entorno, como la luz, el sonido o el movimiento. A continuación, el sensor transmite esa información a los dispositivos electrónicos a los que está conectado.
¿Qué puede medir un sensor?
- Entradas táctiles: botones o pantallas táctiles
- Entradas de movimiento: tu teléfono reconoce que lo has puesto en pantalla panorámica
- Entradas de luz: tus faros se encienden por la noche
- Entradas de temperatura: un termostato se ajusta automáticamente hacia arriba o hacia abajo
- Entradas de humedad: tus limpiaparabrisas se encienden cuando llueve
- Entradas de campo magnético: tu GPS sabe en qué dirección te diriges
- Entradas de vibración: una perforadora de petróleo en un campo se monitoriza por seguridad
- Entradas químicas: un detector de monóxido de carbono señala niveles peligrosos
- Entradas biológicas: detecta tumores, niveles elevados en sangre o toxinas
- Acelerómetro: El tipo de sensor de movimiento más utilizado es el acelerómetro. Mide la aceleración (cambio de velocidad) a través de un solo eje, como cuando se pisa el acelerador en el coche o se deja caer el teléfono. Los acelerómetros miden la aceleración lineal en una dirección determinada. Un acelerómetro también puede utilizarse para medir la gravedad como fuerza descendente. Integrando la aceleración una vez se obtiene una estimación de la velocidad, e integrando de nuevo se obtiene una estimación de la posición. Debido a la doble integración y al estado de la tecnología actual, un acelerómetro no es un método recomendado para estimar la distancia.
- Giroscopio: Mientras que los acelerómetros pueden medir la aceleración lineal, no pueden medir el movimiento de torsión o rotación. Los giroscopios, sin embargo, miden la velocidad angular sobre tres ejes: cabeceo (eje x), balanceo (eje y) y guiñada (eje z). Cuando se integra con un software de fusión de sensores, un giroscopio puede utilizarse para determinar la orientación de un objeto en el espacio 3D. Aunque un giroscopio no tiene un marco de referencia inicial (como la gravedad), puede combinar sus datos con los de un acelerómetro para medir la posición angular. Para una mirada en profundidad a los diferentes tipos de giroscopios, mira nuestro segundo blog titulado, Explorando la aplicación de los giroscopios.
- Magnetómetro: Un magnetómetro, como su nombre indica, mide los campos magnéticos. Puede detectar fluctuaciones en el campo magnético de la Tierra, midiendo la densidad del flujo magnético del aire en el punto del sensor en el espacio. A través de esas fluctuaciones, encuentra el vector hacia el Norte magnético de la Tierra. Esto puede fusionarse con los datos del acelerómetro y el giroscopio para determinar el rumbo absoluto. Como has visto, las IMU se utilizan para medir la aceleración, la velocidad angular y los campos magnéticos y, cuando se combinan con un software de fusión de sensores, pueden utilizarse para determinar el movimiento, la orientación y el rumbo. Se encuentran en muchas aplicaciones de la electrónica de consumo y el sector industrial. En nuestra próxima entrada del blog, profundizaremos en los giroscopios y para qué se utilizan.
Una IMU es un tipo específico de sensor que mide la velocidad angular, la fuerza y, a veces, el campo magnético. Las IMU están compuestas por un acelerómetro de 3 ejes y un giroscopio de 3 ejes, lo que se consideraría una IMU de 6 ejes. También pueden incluir un magnetómetro adicional de 3 ejes, lo que se consideraría una IMU de 9 ejes. Técnicamente, el término «IMU» se refiere sólo al sensor, pero las IMU suelen ir acompañadas de un software de fusión de sensores que combina los datos de varios sensores para proporcionar medidas de orientación y rumbo. En el uso común, el término «IMU» puede usarse para referirse a la combinación del sensor y el software de fusión de sensores; esta combinación también se conoce como AHRS (sistema de referencia de actitud y rumbo).
¿Dónde se encuentran las IMU?
Las aplicaciones comunes de las IMU incluyen la determinación de la dirección en un sistema GPS, el seguimiento del movimiento en productos electrónicos de consumo como teléfonos móviles y mandos de videojuegos, o el seguimiento de los movimientos de la cabeza de un usuario en sistemas de RA (realidad aumentada) y VR (realidad virtual). Esta información de movimiento y orientación también se aplica para mantener el equilibrio de un dron, mejorar el rumbo de su robot aspirador y otros dispositivos domésticos conectados y del IoT.
En el uso industrial, puede utilizar las IMU para alinear y medir el posicionamiento de equipos como las antenas. Las IMU también se utilizan para ayudar a maniobrar aviones, con o sin piloto tripulado. En el ámbito de los consumidores, algunos sistemas de entretenimiento en vuelo utilizan IMUs en sus mandos a distancia para añadir accesibilidad además del tacto. Un enfoque similar puede verse en los mandos a distancia de los televisores inteligentes de LG, que permiten a los usuarios controlar la interfaz de usuario del televisor con un enfoque intuitivo de apuntar y hacer clic en lugar de con botones de dirección.
Las aplicaciones futuras probablemente verán una mayor integración y fusión de la IMU con tecnologías como el GPS (Sistema de Posicionamiento Global), la RF (Radiofrecuencia) y el LiDAR (Light Detection And Ranging), que permitirán la localización precisa de personas, vehículos y equipos (incluidos los autónomos), tanto en interiores como en exteriores.
¿Cómo funciona una IMU?
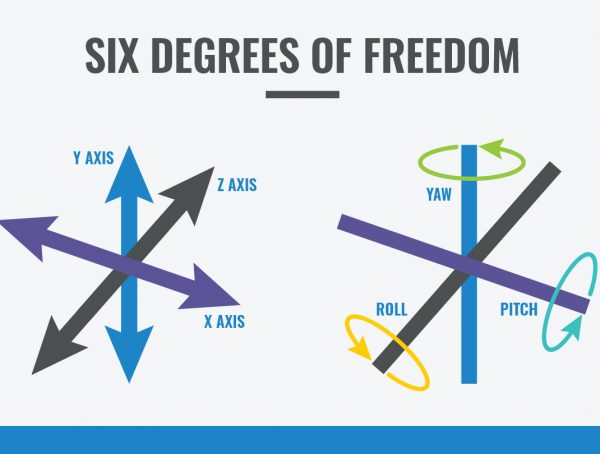
Una IMU proporciona de 2 a 6 DOF (Grados de Libertad), que se refiere al número de formas diferentes en que un objeto es capaz de moverse en el espacio 3D. El máximo posible es de 6 DOF, lo que incluiría 3 grados de movimiento de traslación (plano) a través de un plano recto/a lo largo de cada eje (adelante/atrás, derecha/izquierda, arriba/abajo) y 3 grados de movimiento de rotación a través de los ejes x, y y z/alrededor de cada eje.
![]()
Los datos brutos recogidos por una IMU dan una idea del mundo que la rodea, pero esa información también puede ser procesada para obtener información adicional. La fusión de sensores es el arte (matemático) de combinar los datos de cada sensor de una IMU para crear una imagen más completa de la orientación y el rumbo del dispositivo. Por ejemplo, mientras se observa la información del giroscopio para el movimiento de rotación, se puede incorporar el sentido de la gravedad de los acelerómetros para crear un marco de referencia. Además, se puede añadir información sobre el campo magnético de la Tierra para alinear todo el sensor con el marco terrestre.
Tendencias de los sensores IMU
Los IMU son sólo una parte de un mercado de sensores más amplio que ha experimentado una fuerte demanda últimamente. Una tendencia importante que impulsa este crecimiento es la creciente demanda de dispositivos MEMS (sistema microelectromecánico), que suelen tener un tamaño de entre 20 micrómetros y 1 mm. La reducción constante del tamaño de los dispositivos presiona a los fabricantes de componentes para que reduzcan sus factores de forma a proporciones microscópicas, entre 1 y 100 micrómetros. La industria de los sensores está siguiendo su ejemplo, reduciendo también sus factores de forma.
Además del tamaño físico, hay otras tendencias que también influyen en el futuro de los sensores. La sensibilidad al precio es cada vez mayor, ya que un conjunto cada vez mayor de aplicaciones impulsa la demanda de una producción en masa de sensores de menor coste. Al mismo tiempo, el gran volumen de sensores que demandan los smartphones está reduciendo el coste de los sensores inerciales MEMS, por lo que cada vez se utilizan en más productos, aunque las empresas siguen encontrando problemas técnicos al utilizarlos.
La eficiencia es cada vez más importante en todo el sector, por lo que el consumo de energía de los componentes es otra preocupación creciente. Al mismo tiempo, la vida útil esperada también se está ampliando en los sensores para ciertas aplicaciones. Por ejemplo, un chip utilizado en una aplicación de automatización industrial puede tener que funcionar durante una década o más, en comparación con uno en un dispositivo de consumo, donde sólo son aceptables unos pocos años de vida útil. Los requisitos de calidad del sensor y las condiciones de prueba también diferirán entre la electrónica de consumo, la automoción y las aplicaciones industriales.
3 Principales tipos de dispositivos de sensores de movimiento
Como has visto, las IMU se utilizan para medir la aceleración, la velocidad angular y los campos magnéticos y, cuando se combinan con el software de fusión de sensores, pueden utilizarse para determinar el movimiento, la orientación y el rumbo. Se encuentran en muchas aplicaciones de la electrónica de consumo y el sector industrial. En nuestra próxima entrada del blog, profundizaremos en los giroscopios y para qué se utilizan.

Charles Pao
Charles Pao comenzó a trabajar en Hillcrest Labs tras graduarse en la Universidad Johns Hopkins con un máster en ingeniería eléctrica. Comenzó a trabajar en el desarrollo de software, creando un sistema de caja negra para evaluar las características del movimiento. Apasionado por los medios de comunicación, Charles empezó a producir vídeos de demostración y de productos para Hillcrest Labs. Esta pasión le llevó a un traslado de puesto oficial a Marketing. En la actualidad, es el primer punto de contacto de Hillcrest para obtener información y apoyo y gestiona sus esfuerzos de marketing. También ha desempeñado varias funciones de gestión de cuentas y proyectos. Charles también es licenciado en ingeniería eléctrica e informática por la Universidad Johns Hopkins.
También te puede gustar
Más información sobre Sensor fusion
Nuestras vidas se han transformado gracias a los gadgets portátiles, y conectados – el más obvio es el teléfono inteligente, pero también una multitud de otros, …

Una de las verticales de mayor crecimiento en la electrónica de consumo es el mercado de los hearables. Estos dispositivos en el oído, que van desde auriculares inalámbricos a …

SLAM y los robots multidetectores: Pronto en todos los hogares
La robótica, para muchos de nosotros, sigue siendo una aplicación mayormente limitada a la fábrica o al almacén. Vemos en los medios de comunicación …