Przechadzanie się między samochodami w grze na telefonie, utrzymywanie drona quadcoptera na powierzchni pomimo zmiennych wiatrów, odkurzanie domu przez robota i tłumaczenie Twoich precyzyjnych ruchów podczas noszenia zestawu słuchawkowego VR mają jedną wspólną cechę. Każde z nich korzysta z czujników, a konkretnie z IMU (Inertial Measurement Unit), aby prawidłowo funkcjonować.
Czwartek, 15 listopada 2018
Wyplatanie się między samochody w grze na telefonie, utrzymywanie drona quadcoptera na powierzchni pomimo zmiennego wiatru, odkurzanie domu robotem i tłumaczenie Twoich precyzyjnych ruchów podczas noszenia zestawu słuchawkowego VR mają jedną wspólną cechę. Każde z nich korzysta z czujników, a konkretnie z IMU (Inertial Measurement Unit), aby działać prawidłowo.
Zanim przyjrzymy się IMU w szczególności, zacznijmy szerzej. Czujnik to urządzenie elektroniczne używane w połączeniu z innymi układami elektronicznymi w celu wykrywania zmian w środowisku, takich jak światło, dźwięk lub ruch. Czujnik następnie przekazuje te informacje z powrotem do urządzeń elektronicznych, do których jest podłączony.
Co może mierzyć czujnik?
- Wejścia dotykowe: przyciski lub ekrany dotykowe
- Wejścia ruchowe: Twój telefon rozpoznaje, że obróciłeś go na szeroki ekran
- Wejścia świetlne: Twoje reflektory włączają się w nocy
- Wejścia temperatury: termostat automatycznie reguluje temperaturę w górę lub w dół
- Wejścia wilgotności/wilgotności: wycieraczki przedniej szyby włączają się w deszczu
- Wejścia pola magnetycznego: Twój GPS wie, w którym kierunku zmierzasz
- Wejścia wibracyjne: wiertło naftowe na polu jest monitorowane pod kątem bezpieczeństwa
- Wejścia chemiczne: detektor tlenku węgla sygnalizuje niebezpieczne poziomy
- Wejścia biologiczne: wykrywa guzy, podwyższony poziom krwi lub toksyny
Urządzenie IMU jest specyficznym typem czujnika, który mierzy prędkość kątową, siłę i czasami pole magnetyczne. Jednostki IMU składają się z 3-osiowego akcelerometru i 3-osiowego żyroskopu, co można uznać za 6-osiową jednostkę IMU. Mogą one również zawierać dodatkowy 3-osiowy magnetometr, który byłby uważany za 9-osiowy IMU. Technicznie rzecz biorąc, termin „IMU” odnosi się tylko do czujnika, ale IMU są często sparowane z oprogramowaniem do łączenia czujników, które łączy dane z wielu czujników w celu określenia orientacji i kursu. W powszechnym użyciu, termin „IMU” może być używany w odniesieniu do kombinacji czujnika i oprogramowania do łączenia czujników; kombinacja ta jest również określana jako AHRS (Attitude Heading Reference System).
Gdzie można znaleźć IMU?
Wspólne zastosowania IMU obejmują określanie kierunku w systemie GPS, śledzenie ruchu w elektronice użytkowej, takiej jak telefony komórkowe i piloty do gier wideo, lub śledzenie ruchów głowy użytkownika w systemach AR (rzeczywistości rozszerzonej) i VR (rzeczywistości wirtualnej). Te informacje o ruchu i orientacji mają również zastosowanie w utrzymywaniu równowagi drona, poprawianiu kursu odkurzacza-robota oraz innych urządzeń IoT i podłączonych urządzeń domowych.
W zastosowaniach przemysłowych można używać jednostek IMU do ustawiania i pomiaru położenia sprzętu, takiego jak anteny. Jednostki IMU są również wykorzystywane do pomocy w manewrowaniu samolotem, z pilotem lub bez niego. W przestrzeni konsumenckiej, niektóre systemy rozrywki pokładowej wykorzystują jednostki IMU w swoich pilotach, aby oprócz funkcji dotykowych zwiększyć dostępność. Podobne podejście można zaobserwować w przypadku pilotów LG Smart TV, które pozwalają użytkownikom kontrolować interfejs użytkownika telewizora za pomocą intuicyjnego podejścia „wskaż i kliknij” zamiast przycisków kierunkowych.
W przyszłych zastosowaniach prawdopodobnie nastąpi ściślejsza integracja i połączenie IMU z technologiami takimi jak GPS (Global Positioning System), RF (Radio Frequency) i LiDAR (Light Detection And Ranging), co umożliwi dokładną lokalizację ludzi, pojazdów i urządzeń (w tym autonomicznych), zarówno wewnątrz, jak i na zewnątrz budynków.
Jak działa jednostka IMU?
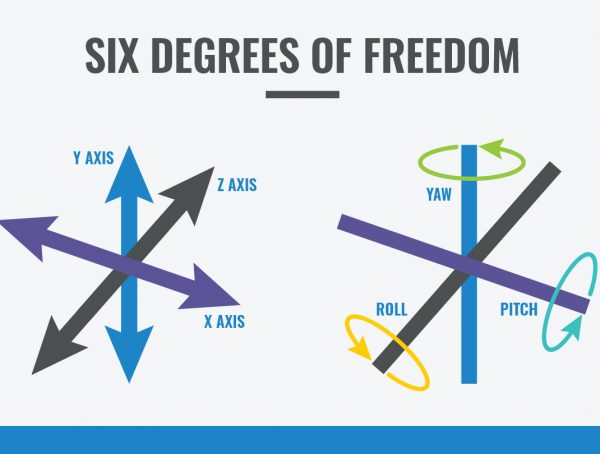
Jednostka IMU zapewnia od 2 do 6 DOF (stopni swobody), co odnosi się do liczby różnych sposobów, na jakie obiekt może się poruszać w przestrzeni 3D. Maksymalnie możliwe jest 6 DOF, co obejmuje 3 stopnie ruchu translacyjnego (płaskiego) w płaszczyźnie prostej/wzdłuż każdej osi (przód/tył, prawo/lewo, góra/dół) oraz 3 stopnie ruchu obrotowego w osiach x, y i z/pomiędzy każdą osią.
![]()
Surowe dane zebrane z IMU dają pewne wyobrażenie o otaczającym świecie, ale informacje te można również przetwarzać w celu uzyskania dodatkowego wglądu. Fuzja czujników to (matematyczna) sztuka łączenia danych z każdego czujnika w jednostce IMU w celu stworzenia bardziej kompletnego obrazu orientacji i kierunku urządzenia. Na przykład, patrząc na informacje z żyroskopu dotyczące ruchu obrotowego, można uwzględnić dane z akcelerometru dotyczące grawitacji, aby utworzyć ramę odniesienia. Możesz dodatkowo dodać informacje o polu magnetycznym Ziemi, aby wyrównać cały czujnik do ramki Ziemi.
Trendy w czujnikach IMU
Urządzenia IMU są tylko częścią większego rynku czujników, który ostatnio odnotowuje duży popyt. Jednym z istotnych trendów napędzających ten wzrost jest rosnący popyt na urządzenia MEMS (microelectromechanical system), które zazwyczaj mają rozmiar od 20 mikrometrów do 1 mm. Stale zmniejszające się rozmiary urządzeń wywierają presję na producentów komponentów, aby zmniejszać ich rozmiary do mikroskopijnych rozmiarów, od 1 do 100 mikrometrów. Branża czujników podąża za tym przykładem, zmniejszając również swoje współczynniki kształtu.
Poza rozmiarami fizycznymi, na przyszłość czujników wpływa również kilka innych trendów. Wrażliwość na cenę wzrasta, ponieważ rozszerzający się zestaw zastosowań napędza popyt na tańszą masową produkcję czujników. Tymczasem sama ilość czujników wymaganych przez smartfony obniża koszt czujników inercyjnych MEMS, więc są one stosowane w coraz większej liczbie produktów, ale firmy wciąż napotykają na problemy techniczne związane z ich wykorzystaniem.
Wydajność staje się coraz bardziej krytyczna w całej branży, więc zużycie energii na poziomie komponentów jest kolejnym rosnącym problemem. Jednocześnie, spodziewany okres użytkowania czujników w niektórych zastosowaniach również się wydłuża. Na przykład, układ scalony wykorzystywany w aplikacji automatyki przemysłowej może wymagać pracy przez dekadę lub dłużej, w porównaniu z układem w urządzeniu konsumenckim, gdzie akceptowalne jest tylko kilka lat oczekiwanej żywotności. Wymagania dotyczące jakości czujnika i warunków testowania będą również różne w przypadku elektroniki użytkowej, motoryzacji i zastosowań przemysłowych.
3 Główne typy czujników ruchu
- Akcelerometr: Najpowszechniej stosowanym typem czujnika ruchu jest akcelerometr. Mierzy on przyspieszenie (zmianę prędkości) w jednej osi, na przykład po wdepnięciu gazu w samochodzie lub upuszczeniu telefonu. Akcelerometry mierzą przyspieszenie liniowe w określonym kierunku. Akcelerometr może być również używany do pomiaru grawitacji jako siły skierowanej w dół. Jednokrotne całkowanie przyspieszenia pozwala uzyskać oszacowanie prędkości, a ponowne całkowanie pozwala uzyskać oszacowanie położenia. Ze względu na podwójne całkowanie i stan dzisiejszej technologii, akcelerometr nie jest zalecaną metodą szacowania odległości.
- Żyroskop: Podczas gdy akcelerometry mogą mierzyć przyspieszenie liniowe, nie mogą mierzyć ruchu skręcającego lub obrotowego. Żyroskopy natomiast mierzą prędkość kątową w trzech osiach: nachylenie (oś x), przechylenie (oś y) i odchylenie (oś z). Po zintegrowaniu z oprogramowaniem łączącym czujniki, żyroskop może być użyty do określenia orientacji obiektu w przestrzeni 3D. Chociaż żyroskop nie ma początkowego układu odniesienia (jak grawitacja), można połączyć jego dane z danymi z akcelerometru, aby zmierzyć położenie kątowe. Aby uzyskać szczegółowe informacje na temat różnych typów żyroskopów, zajrzyj na nasz 2. blog zatytułowany „Zastosowanie żyroskopów”.
- Magnetometr: Magnetometr, jak sama nazwa wskazuje, mierzy pola magnetyczne. Może wykryć wahania w polu magnetycznym Ziemi, poprzez pomiar gęstości strumienia magnetycznego powietrza w punkcie czujnika w przestrzeni. Poprzez te fluktuacje, znajduje wektor w kierunku ziemskiej magnetycznej północy. Można to połączyć z danymi z akcelerometru i żyroskopu, aby określić kurs bezwzględny. Jak widać, jednostki IMU są wykorzystywane do pomiaru przyspieszenia, prędkości kątowej i pola magnetycznego, a w połączeniu z oprogramowaniem do łączenia czujników mogą być używane do określania ruchu, orientacji i kierunku. Znajdują one wiele zastosowań w elektronice użytkowej i sektorze przemysłowym. W naszym następnym wpisie na blogu, zajmiemy się żyroskopami i ich zastosowaniem.
Jak widać, jednostki IMU są używane do pomiaru przyspieszenia, prędkości kątowej i pola magnetycznego, a w połączeniu z oprogramowaniem do łączenia czujników, mogą być używane do określania ruchu, orientacji i kierunku. Znajdują się one w wielu zastosowaniach w elektronice użytkowej i sektorze przemysłowym. W naszym następnym wpisie na blogu zajmiemy się żyroskopami i tym, do czego są wykorzystywane.

Charles Pao
Charles Pao rozpoczął pracę w Hillcrest Labs po ukończeniu Johns Hopkins University z tytułem magistra inżyniera elektryka. Rozpoczął pracę w dziale rozwoju oprogramowania, tworząc system czarnej skrzynki do oceny charakterystyki ruchu. Z zamiłowania do mediów i komunikacji, Charles zaczął produkować filmy demonstracyjne i produktowe dla Hillcrest Labs. Ta pasja doprowadziła do oficjalnego przeniesienia na stanowisko w dziale marketingu. Obecnie jest pierwszym punktem kontaktowym firmy Hillcrest w zakresie informacji i wsparcia oraz zarządza jej działaniami marketingowymi. Pełnił również różne funkcje związane z zarządzaniem kontami i projektami. Charles uzyskał również tytuł licencjata w dziedzinie elektrotechniki i inżynierii komputerowej na Uniwersytecie Johnsa Hopkinsa.
Możesz też polubić
Więcej o Sensor fusion
Uzyskanie dokładnego śledzenia ruchu w przenośnych urządzeniach konsumenckich
Nasze życie zostało zmienione przez przenośne, połączonych gadżetów – najbardziej oczywisty jest smartfon, ale także wiele innych, …

Jak technologia czujników umożliwia uzyskanie świadomości kontekstu w urządzeniach przenośnych
Jedną z najszybciej rozwijających się gałęzi elektroniki użytkowej jest rynek urządzeń przenośnych. Te urządzenia douszne, od bezprzewodowych wkładek dousznych po …

SLAM i roboty multisensing: Wkrótce w każdym domu
Robotyka, dla wielu z nas, jest wciąż zastosowaniem ograniczonym głównie do fabryki lub hali magazynowej. Widzimy w mediach …